
[本站 资讯] 10月17日,极越正式发布了其BEV+Transformer“纯视觉”高阶智驾技术方案,宣称其现已在上海城区道路实现领航辅助驾驶。同时,极越与百度联合研发的国内首个占用网络技术(Occupancy Network,“OCC”)也首次对外公布,该技术的引入将进一步提升汽车“纯视觉”高阶智驾能力。同时官方表示,极越01将会在10月底正式上市。

『极越01』
目前,极越高阶智能辅助驾驶系统的核心功能――点到点领航辅助PPA凭借纯视觉能力就已跑通上海城区主要核心道路。在极越官方社交账号发布的一段城市领航辅助驾驶路试视频中,一台仅搭载纯视觉感知架构的极越01“一镜到底”跑完了上海陆家嘴-外滩-南浦大桥等路段,全程零接管。

『极越01高阶智驾“纯视觉”城区道路路试』
为进一步拉高“纯视觉”技术方案的能力上限,极越与百度联合研发了OCC占用网络技术。BEV+Transformer的“纯视觉”方案+OCC占用网络技术会成为极越高阶智驾的完整体系,现已具备量产能力,很快就会实现落地应用。
官方表示,凭借BEV+Transformer的“纯视觉”,能够快速、精准地预测道路参与者的位姿轨迹,配合业内领先的OCC占用网络技术能够帮助汽车机器人更准确还原3D场景,可以获取比激光雷达点云分辨率更高的三维结构信息,还能减少漏检、误检并弥补视觉所不具备的空间高度信息,突破能力上限和提升安全保障的同时,替代了激光雷达,提升了泛化能力。
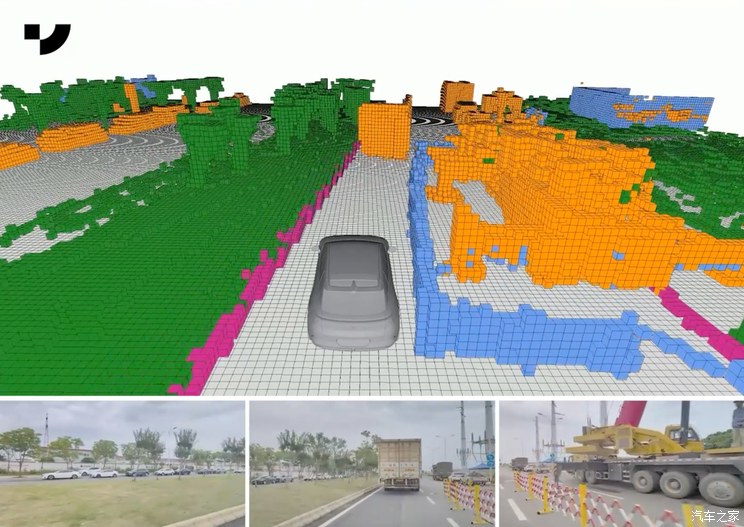
『极越OCC占用网络技术演示』
在极越发布的OCC占用网络技术演示视频中,OCC技术在汽车机器人的视觉世界里,实时重建还原3D场景。极越01的感知系统用体素清晰展示了栏杆、绿植、路障等标准障碍物,同时还精准识别出了施工中的工程车、树木中的路灯等异形障碍物,能适应更复杂场景和不同环境。
原创文章,作者:车主头条,如若转载,请注明出处:http://www.chezutt.com/xinche/141389.html